

Mir sinn ee vun de professionnellesten FA One-Stop-Liwweranten a China. Eis Haaptprodukter enthalen Servomotor, Planetargetriebe, Inverter a PLC, HMI. Marken wéi Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron usw.; Liwwerzäit: Bannent 3-5 Aarbechtsdeeg nom Empfang vun der Bezuelung. Bezuelmethoden: T/T, L/C, PayPal, West Union, Alipay, Wechat usw.
| Artikel | Spezifikatiounen |
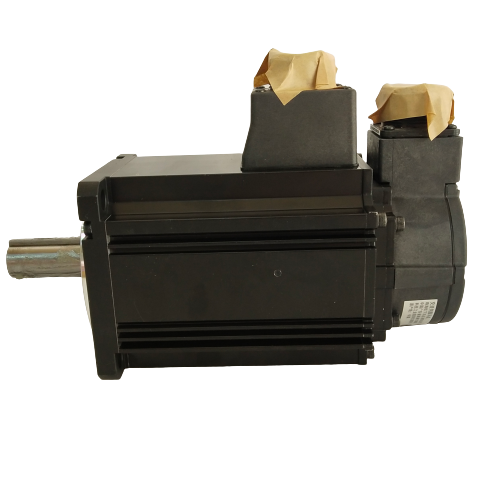
| Deelnummer | MSME202GCGM |
| Detailer | Niddreg Trägheet, Steckertyp, IP65 |
| Familljennumm | MINAS A5 |
| Serie | MSME Serie |
| Typ | Niddreg Trägheet |
| Produkt op Bestellung | Produkt op Bestellung |
| Virsiichtsmoossname fir speziell bestallte Produkter | Vermeit w.e.g., datt de Motor oder d'Ausrüstung, déi de Motor enthält, a Japan oder aner Regiounen duerch Japan verdeelt ginn. |
| Schutzklass | IP65 |
| Iwwer d'Gehäuse | Ausser dem rotéierenden Deel vun der Ausgangswelle an dem Verbindungsstiftdeel vum Motorstecker an dem Encoderstecker. |
| Ëmweltbedingungen | Fir méi Detailer, kuckt w.e.g. an der Gebrauchsanweisung no. |
| Flansch quadratesch Dimensioun | 100 mm quadrat |
| Flanschquadratdimensioun (Eenheet: mm) | 100 |
| Konfiguratioun vum Motor-Ausgangskanal | Stecker |
| Motorencoder-Stecker | Stecker |
| Stroumversuergungsleistung (kVA) | 3.3 |
| Spannungsspezifikatiounen | 200 Volt |
| Nennleistung | 2000 Watt |
| Nennstroum (A (rms)) | 11.3 |
| Brems halen | ouni |
| Mass (kg) | 5.3 |
| Uelegdichtring | mat |
| Schacht | Schlësselwee |
| Nenndréimoment (N ⋅ m) | 6,37 |
| Momentan maximalt Spëtzemoment (N ⋅ m) | 19.1 |
| Max. Stroum (A (Op)) | 48 |
| Regenerativ Bremsfrequenz (mol/min) | Ouni Optioun: Keng Limit Mat Optioun: Keng Limit Optioun (Externen regenerativen Widderstand) Artikelnummer: DV0P4285 |
| Iwwer d'regenerativ Bremsfrequenz | Kuckt w.e.g. d'Detailer vun [Motorspezifikatiounsbeschreiwung], Bemierkung: 1 an 2. |
| Nennrotatiounsgeschwindegkeet (r/min) | 3000 |
| Nennrotatioun Maximal Geschwindegkeet (r/min) | 5000 |
| Trägheetsmoment vum Rotor (x10-4kg ⋅ m²) | 3,68 |
| Recommandéiert Trägheetsverhältnis vun der Laascht an dem Rotor | 15 Mol oder manner |
| Iwwer dat recommandéiert Trägheetsverhältnis vun der Laascht an dem Rotor | Kuckt w.e.g. d'Detailer vun der [Motorspezifikatiounsbeschreiwung], Bemierkung: 3. |
| Rotatiounscoder: Spezifikatiounen | 20-Bit Inkrementsystem |
| Rotatiounscoder: Opléisung | 1048576 |
Zulässlech Belaaschtung
| Artikel | Spezifikatiounen |
| Beim Montage: Radial Belaaschtung P-Richtung (N) | 980 |
| Beim Montage: Schublast A-Richtung (N) | 588 |
| Beim Montage: Schublast B-Richtung (N) | 686 |
| Wärend dem Betrib: Radial Belaaschtung P-Richtung (N) | 490 |
| Wärend dem Betrib: Schublast A, B-Richtung (N) | 196 |
| Iwwer déi zulässlech Belaaschtung | Fir méi Detailer, kuckt w.e.g. d'[Motorspezifikatiounsbeschreiwung] "Zoulässeg Belaaschtung op der Ausgangswelle". |
10 W bis 7,5 kW, Input-Stroumversuergung fir den Treiber: Spannung DC 24 V/48 V・AC 100 V/200 V/400 V, 20 Bit inkrementell・17-Bit Absolut-/Inkremental-Encoder, Frequenzgang 2,3 kHz
Realiséiert séier a präzis Bewegung. Schnell Reaktioun & héichpräzis Positionéierung
Neien Algorithmus adoptéiert„Kontroll mat zwee Fräiheetsgraden"(2DOF) fir d'Produktivitéit an d'Bearbechtungsgenauegkeet ze verbesseren.
Am konventionelle Modell, well mir d'Feedforward- a Feedback-Kontrollen net separat upasse konnten, mat anere Wierder och wann mir nëmmen upassen„Approche"vum Feedforward, et hat eng Verbindung mat„Siidlung"vun der Feedbackkontroll war eng géigesäiteg Upassung noutwendeg.










